
第07章 硬件接口层
7.1 电机模块
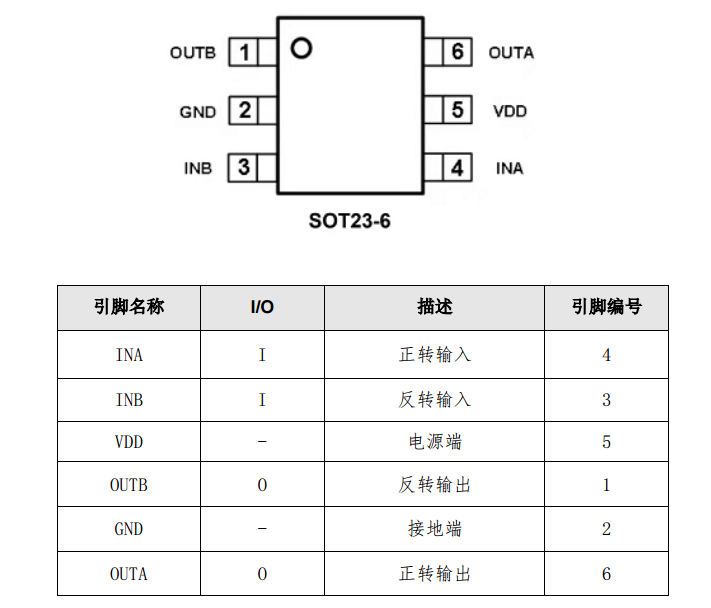
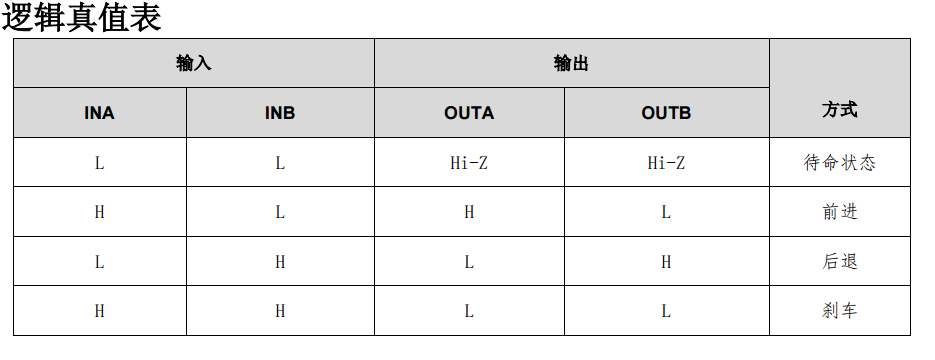
① 电机驱动芯片 BDR6120S
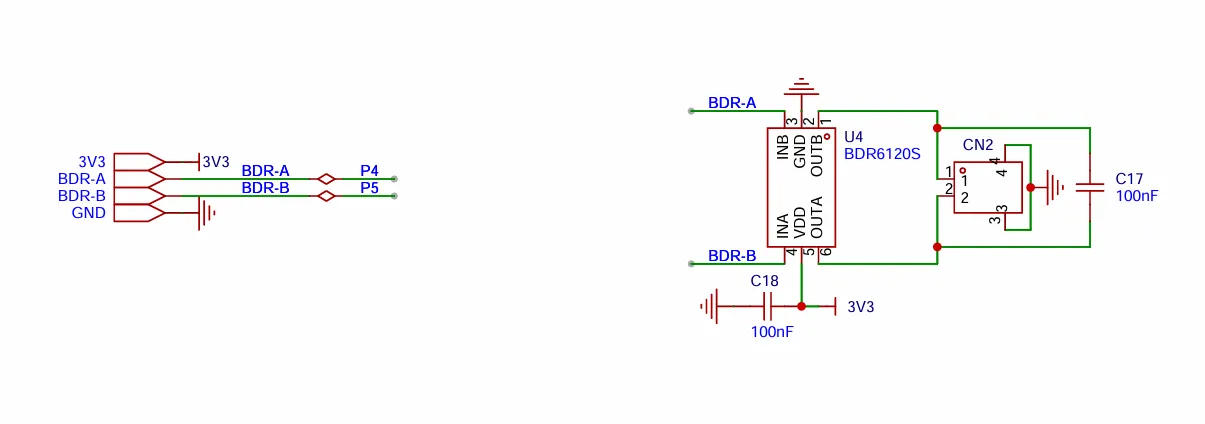
② 原理图
③ 代码
Int_BDR6120S.h
#ifndef __INT_BDR6120S_H__
#define __INT_BDR6120S_H__
#include "driver/gpio.h"
#include "esp_task.h"
#define BDR6120S_INTA GPIO_NUM_4
#define BDR6120S_INTB GPIO_NUM_5
/**
* @brief 初始化BDR6120S
*
*/
void Int_BDR6120S_Init(void);
/**
* @brief 开锁
*
*/
void Int_BDR6120S_OpenLock(void);
#endif /* __INT_BDR6120S_H__ */Int_BDR6120S.c
#include "Int_BDR6120S.h"
// 静态函数:电机前进
static void Int_BDR6120S_Forward(void)
{
gpio_set_level(BDR6120S_INTA, 1);
gpio_set_level(BDR6120S_INTB, 0);
}
// 静态函数:电机后退
static void Int_BDR6120S_Backward(void)
{
gpio_set_level(BDR6120S_INTA, 0);
gpio_set_level(BDR6120S_INTB, 1);
}
// 静态函数:电机刹车
static void Int_BDR6120S_Brake(void)
{
gpio_set_level(BDR6120S_INTA, 1);
gpio_set_level(BDR6120S_INTB, 1);
}
/**
* @brief 初始化BDR6120S
*
*/
void Int_BDR6120S_Init(void)
{
// 1. 设置 GPIO
// 创建gpio配置结构体
gpio_config_t io_conf = {};
// 关闭中断
io_conf.intr_type = GPIO_INTR_DISABLE;
// 设置为输出模式
io_conf.mode = GPIO_MODE_OUTPUT;
// 选择引脚
io_conf.pin_bit_mask = (1 << BDR6120S_INTA) | (1 << BDR6120S_INTB);
// 关闭下拉
io_conf.pull_down_en = GPIO_PULLDOWN_DISABLE;
// 关闭上拉
io_conf.pull_up_en = GPIO_PULLUP_DISABLE;
// 配置GPIO
gpio_config(&io_conf);
// 2. 设置电机初始状态(两个引脚拉低)
gpio_set_level(BDR6120S_INTA, 0);
gpio_set_level(BDR6120S_INTB, 0);
}
/**
* @brief 开锁
*
*/
void Int_BDR6120S_OpenLock(void)
{
// 1. 电机正转,保持200ms
Int_BDR6120S_Forward();
vTaskDelay(200);
// 2. 电机刹车
Int_BDR6120S_Brake();
// 3. 保持5 让用户拉开门
vTaskDelay(5000);
// 4. 电机反转,保持200ms
Int_BDR6120S_Backward();
vTaskDelay(200);
// 5. 电机刹车
Int_BDR6120S_Brake();
}main.c 测试验证
#include <stdio.h>
#include "Com_Debug.h"
#include "Int_BDR6120S.h"
void app_main(void)
{
MY_LOGI("Smart Lock Project: BDR6120S");
// 1. 初始化BDR6120S
Int_BDR6120S_Init();
// 2. 开锁
Int_BDR6120S_OpenLock();
while (1)
{
vTaskDelay(1000);
}
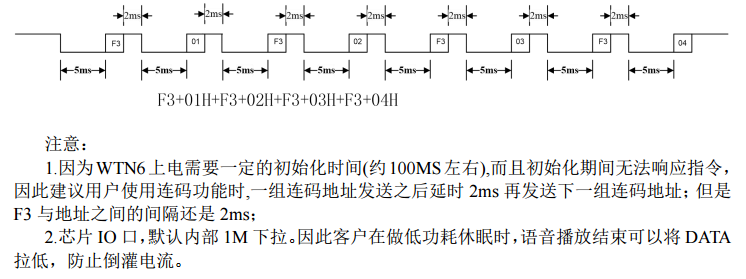
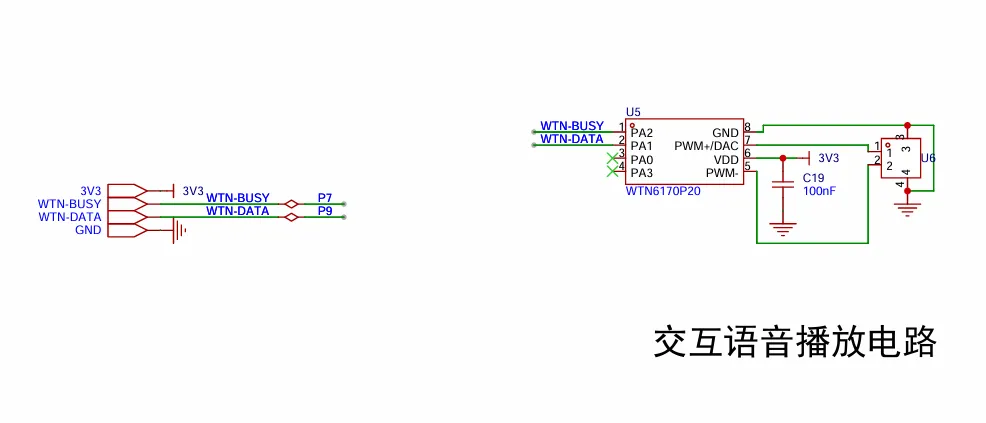
}7.2 语音模块
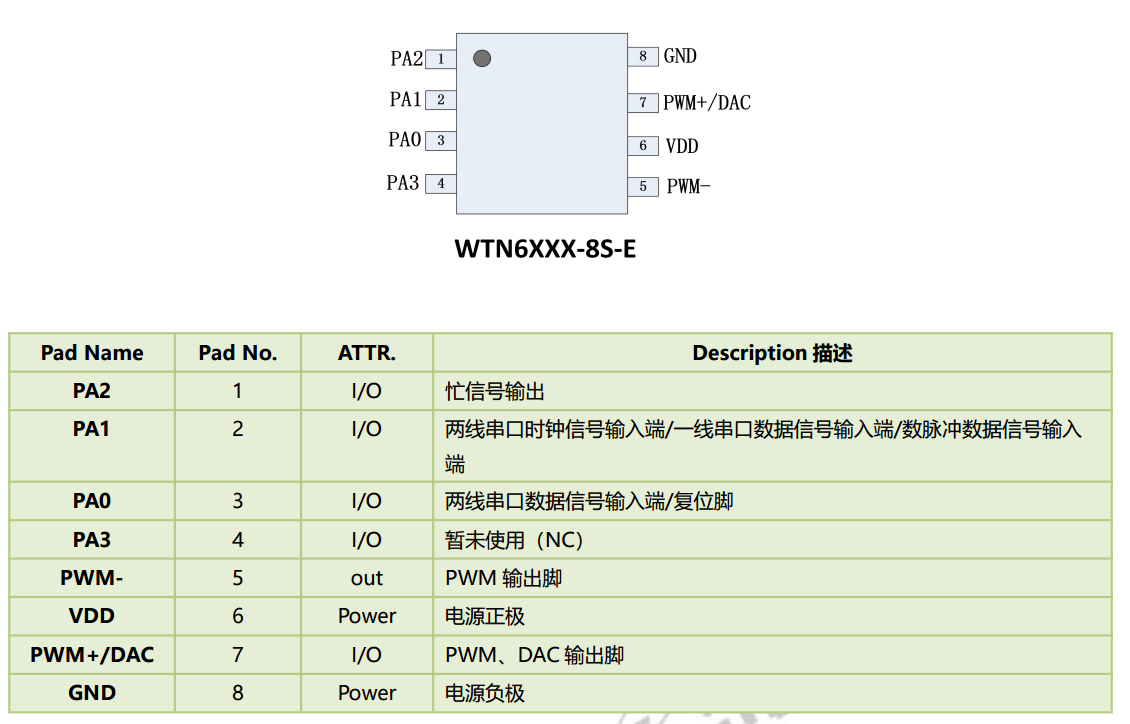
① 语音芯片 WTN6170
② 原理图
③ 代码
Int_WTN6170.h
#ifndef __INT_WTN6170_H__
#define __INT_WTN6170_H__
#include "esp_task.h"
#include "sys/unistd.h"
#include "driver/gpio.h"
// 宏定义引脚
#define WIN6170_DATA_PIN GPIO_NUM_9
// 宏定义拉高和拉低引脚
#define WIN6170_DATA_PIN_H gpio_set_level(WIN6170_DATA_PIN, 1)
#define WIN6170_DATA_PIN_L gpio_set_level(WIN6170_DATA_PIN, 0)
/**
* @brief 初始化WTN6170语音模块
*
*/
void Int_WTN6170_Init(void);
/**
* @brief 发送命令
*
* @param cmd 命令字节
*/
void Int_WTN6170_SendCmd(uint8_t cmd);
#endif /* __INT_WTN6170_H__ */Int_WTN6170.c
#include "Int_WTN6170.h"
/**
* @brief 初始化WTN6170语音模块
*
*/
void Int_WTN6170_Init(void)
{
// 1. 设置GPIO -------------------------------
// 初始化配置结构体
gpio_config_t io_conf = {};
// 禁用中断
io_conf.intr_type = GPIO_INTR_DISABLE;
// 设置为输出模式
io_conf.mode = GPIO_MODE_OUTPUT;
// 设置引脚位掩码(注意:ESP32-C3使用64位掩码)
io_conf.pin_bit_mask = (1 << WIN6170_DATA_PIN);
// 禁用下拉电阻
io_conf.pull_down_en = 0;
// 禁用上拉电阻
io_conf.pull_up_en = 0;
// 使用给定配置配置GPIO
gpio_config(&io_conf);
// 2. 拉高数据引脚,处于空闲状态
WIN6170_DATA_PIN_H;
// 3. 上电初始化需要时间,延时200ms
vTaskDelay(200);
}
/**
* @brief 发送命令
*
* @param cmd 命令字节
*/
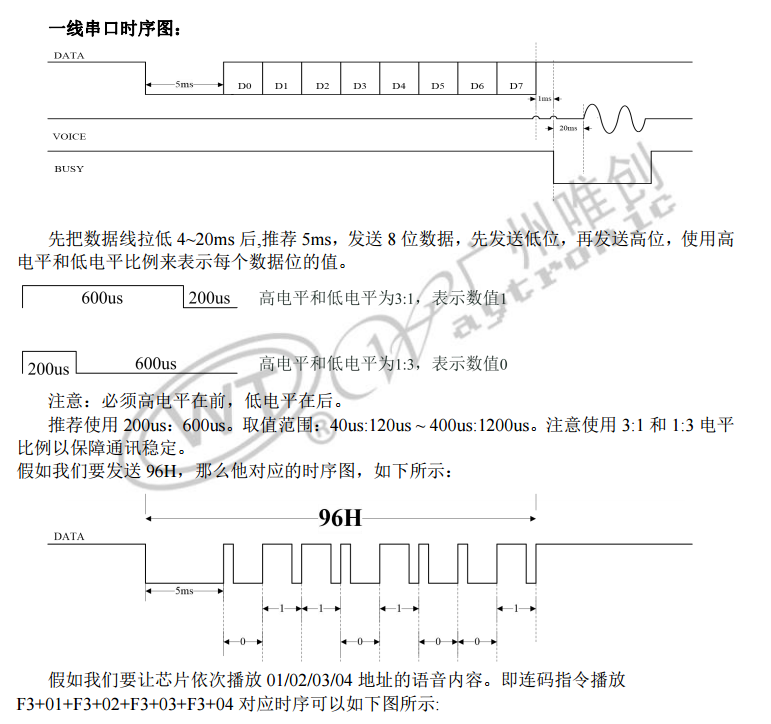
void Int_WTN6170_SendCmd(uint8_t cmd)
{
// 拉低数据引脚,并延时4~20ms,这里延时10ms
WIN6170_DATA_PIN_L;
vTaskDelay(10);
// 逐bit发送命令,先发低位
for (uint8_t i = 0; i < 8; i++)
{
// 判断当前最低位,如果是1,拉高数据引脚
if (cmd & 0x01)
{
// 高电平,持续600us
WIN6170_DATA_PIN_H;
usleep(600);
// 低电平,持续200us
WIN6170_DATA_PIN_L;
usleep(200);
}
// 当前最低位,如果是0,拉低数据引脚
else
{
// 高电平,持续200us
WIN6170_DATA_PIN_H;
usleep(200);
// 低电平,持续600us
WIN6170_DATA_PIN_L;
usleep(600);
}
// 右移1为,将已经发出的位移走
cmd >>= 1;
}
// 拉高数据引脚,并延时5ms
WIN6170_DATA_PIN_H;
vTaskDelay(5);
}相关宏定义
将一下宏定义添加到 Int_WTN6170.h 中
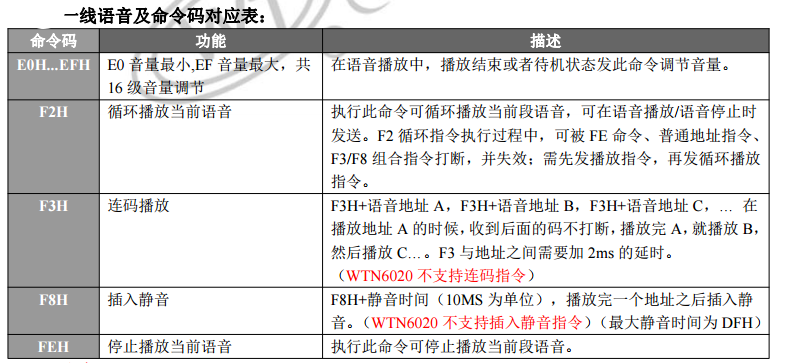
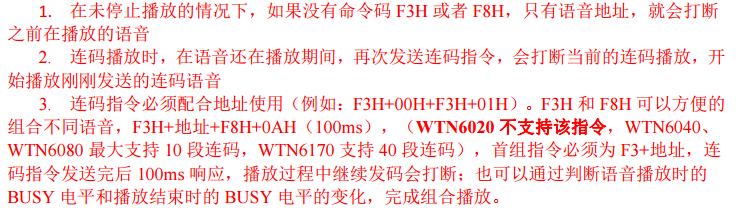
#define sayWithoutInt() Int_WTN6170_SendCmd(0xf3)
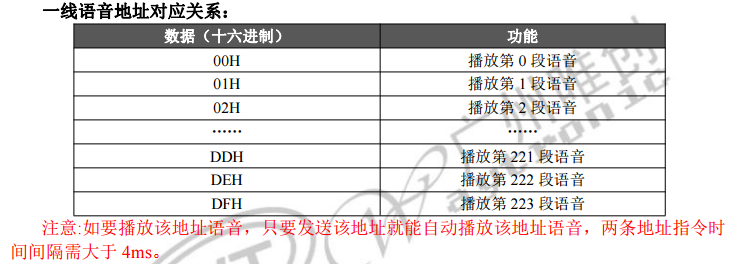
#define sayNum(x) Int_WTN6170_SendCmd(x + 1)
#define sayWaterDrop() Int_WTN6170_SendCmd(11)
#define sayBuzzer() Int_WTN6170_SendCmd(12)
#define sayAlarm() Int_WTN6170_SendCmd(13)
#define sayDoorBell() Int_WTN6170_SendCmd(14)
#define sayFail() Int_WTN6170_SendCmd(16)
#define sayPassword() Int_WTN6170_SendCmd(19)
#define sayDoorOpen() Int_WTN6170_SendCmd(25)
#define sayDoorClose() Int_WTN6170_SendCmd(26)
#define sayIllegalOperation() Int_WTN6170_SendCmd(28)
#define sayVerify() Int_WTN6170_SendCmd(31)
#define sayFinish() Int_WTN6170_SendCmd(33)
#define sayPressSharp() Int_WTN6170_SendCmd(34)
#define sayDelSucc() Int_WTN6170_SendCmd(36)
#define sayDelFail() Int_WTN6170_SendCmd(37)
#define sayDelAll() Int_WTN6170_SendCmd(39)
#define sayDelInvalid() Int_WTN6170_SendCmd(40)
#define sayVerifySucc() Int_WTN6170_SendCmd(41)
#define sayVerifyFail() Int_WTN6170_SendCmd(42)
#define saySetSucc() Int_WTN6170_SendCmd(43)
#define saySetFail() Int_WTN6170_SendCmd(44)
#define sayOperateSucc() Int_WTN6170_SendCmd(46)
#define sayOperateFail() Int_WTN6170_SendCmd(47)
#define sayInvalid() Int_WTN6170_SendCmd(48)
#define sayAddSucc() Int_WTN6170_SendCmd(49)
#define sayAddFail() Int_WTN6170_SendCmd(50)
#define sayAddUser() Int_WTN6170_SendCmd(51)
#define sayDelUser() Int_WTN6170_SendCmd(52)
#define sayUserFull() Int_WTN6170_SendCmd(53)
#define sayAddAdmin() Int_WTN6170_SendCmd(54)
#define sayDelAdmin() Int_WTN6170_SendCmd(55)
#define sayAdmIntull() Int_WTN6170_SendCmd(56)
#define sayCheckAdmin() Int_WTN6170_SendCmd(57)
#define sayRetry() Int_WTN6170_SendCmd(58)
#define sayInputUserPassword() Int_WTN6170_SendCmd(64)
#define sayInputUserPasswordAgain() Int_WTN6170_SendCmd(65)
#define sayPasswordAddSucc() Int_WTN6170_SendCmd(66)
#define sayPasswordAddFail() Int_WTN6170_SendCmd(67)
#define sayPasswordVerifySucc() Int_WTN6170_SendCmd(68)
#define sayPasswordVerifyFail() Int_WTN6170_SendCmd(69)
#define sayInputAdminPassword() Int_WTN6170_SendCmd(70)
#define sayInputAdminPasswordAgain() Int_WTN6170_SendCmd(71)
#define sayAddUserFingerprint() Int_WTN6170_SendCmd(76)
#define sayDelUserFingerprint() Int_WTN6170_SendCmd(77)
#define sayPlaceFinger() Int_WTN6170_SendCmd(80)
#define sayPlaceFingerAgain() Int_WTN6170_SendCmd(81)
#define sayTakeAwayFinger() Int_WTN6170_SendCmd(82)
#define sayFingerprintAddSucc() Int_WTN6170_SendCmd(83)
#define sayFingerprintAddFail() Int_WTN6170_SendCmd(84)
#define sayFingerprintVerifySucc() Int_WTN6170_SendCmd(85)
#define sayFingerprintVerifyFail() Int_WTN6170_SendCmd(86)main.c 测试验证
#include <stdio.h>
#include "Com_Debug.h"
#include "Int_WTN6170.h"
void app_main(void)
{
MY_LOGI("Smart Lock Project: WTN6170 Test");
// 1. 初始化语音芯片
Int_WTN6170_Init();
// 2. 发送连码指令
Int_WTN6170_SendCmd(0xF3);
Int_WTN6170_SendCmd(99);
Int_WTN6170_SendCmd(0xF3);
Int_WTN6170_SendCmd(100);
// // 2. 发送连码指令
// sayWithoutInt();
// sayDoorOpen();
// sayWithoutInt();
// sayDoorClose();
// sayWithoutInt();
// sayNum(5);
while (1)
{
vTaskDelay(1000);
}
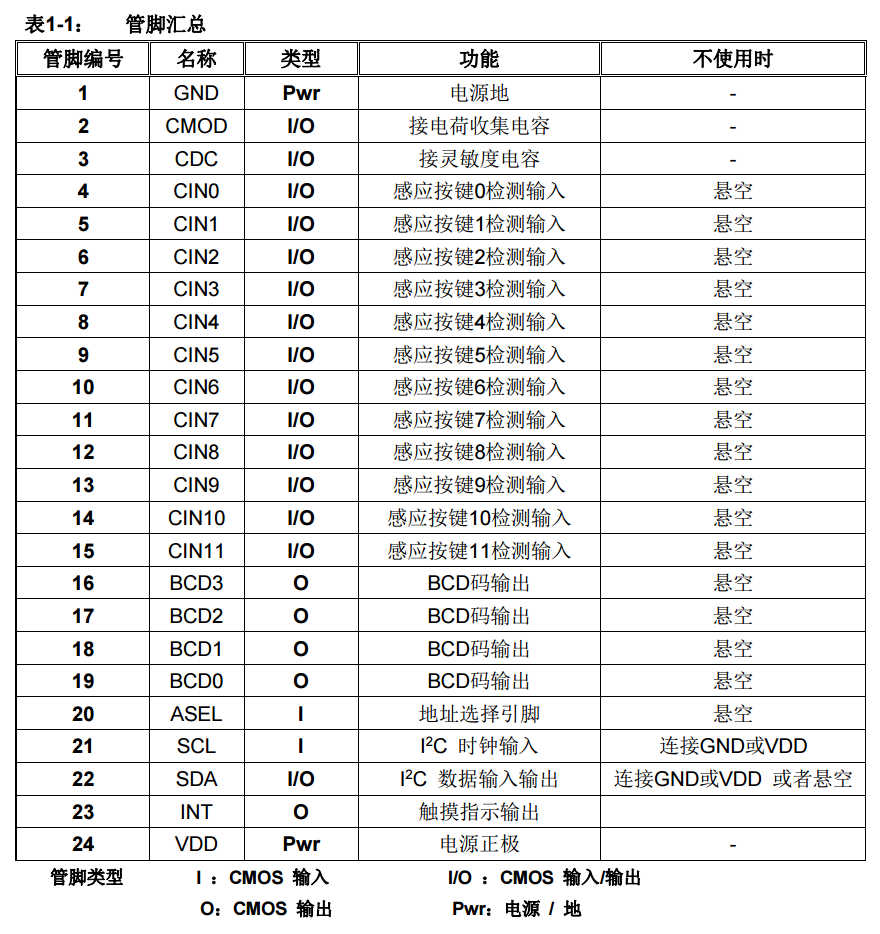
}7.3 按键模块
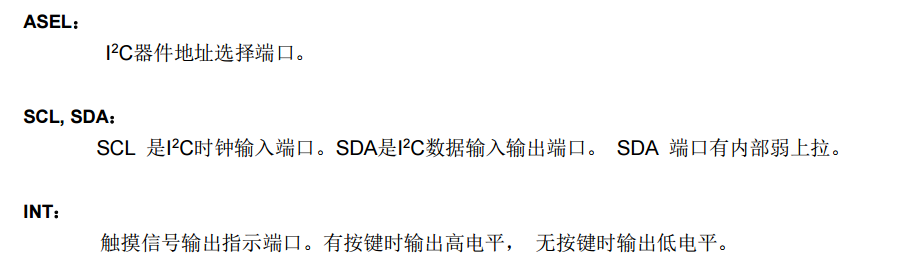
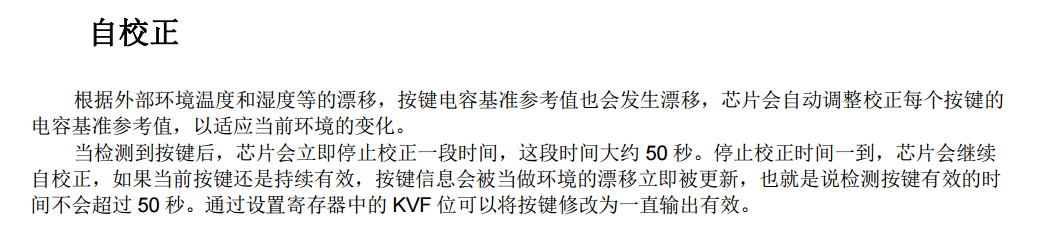
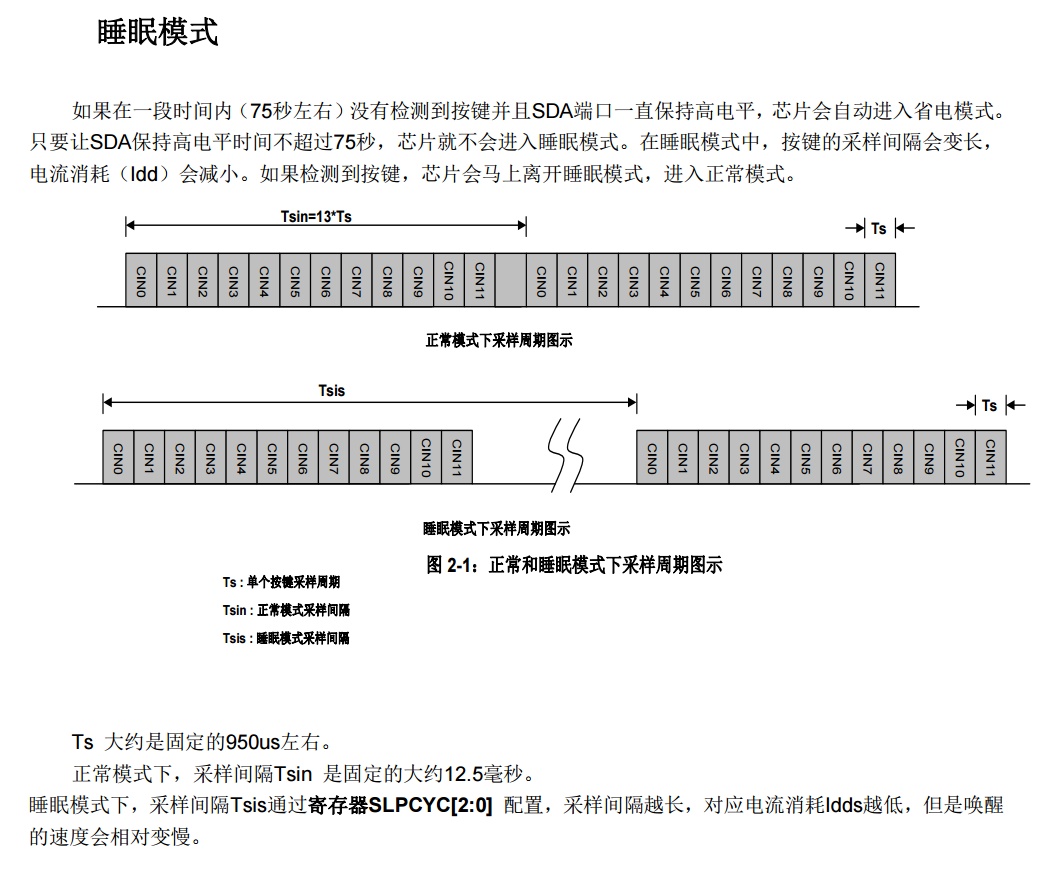
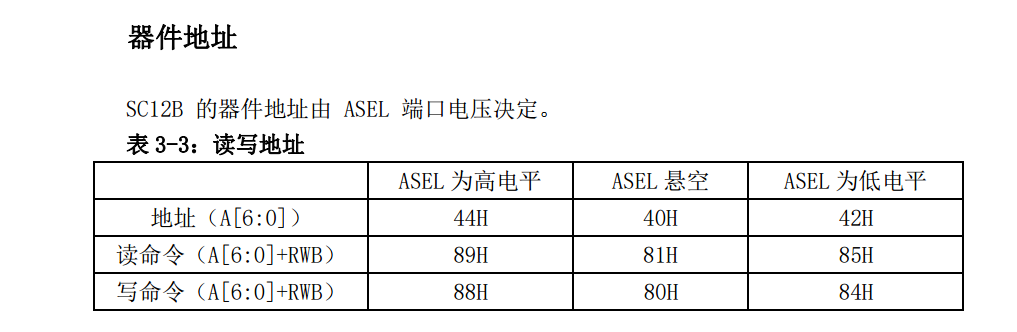
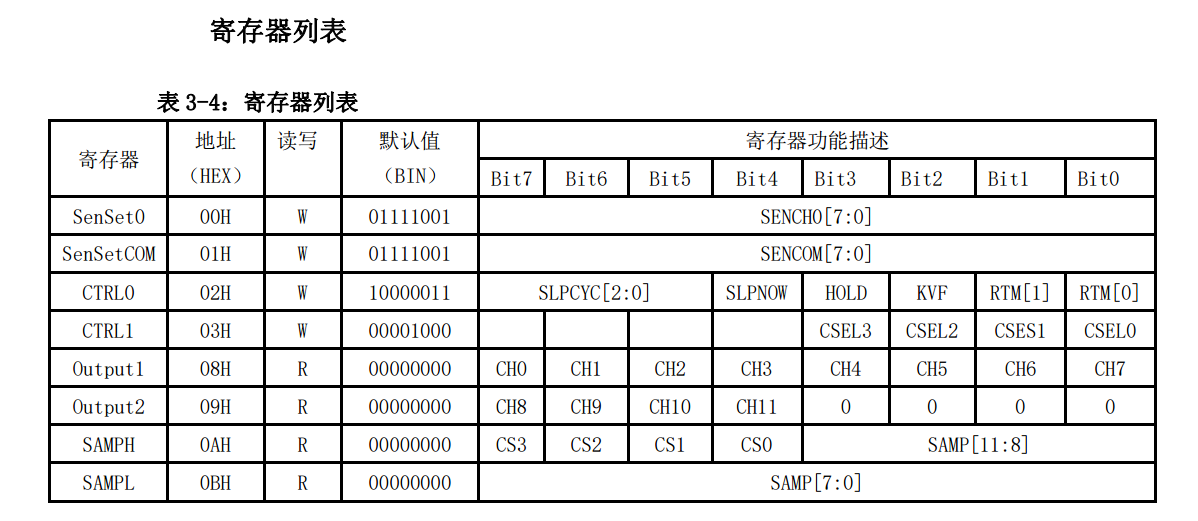
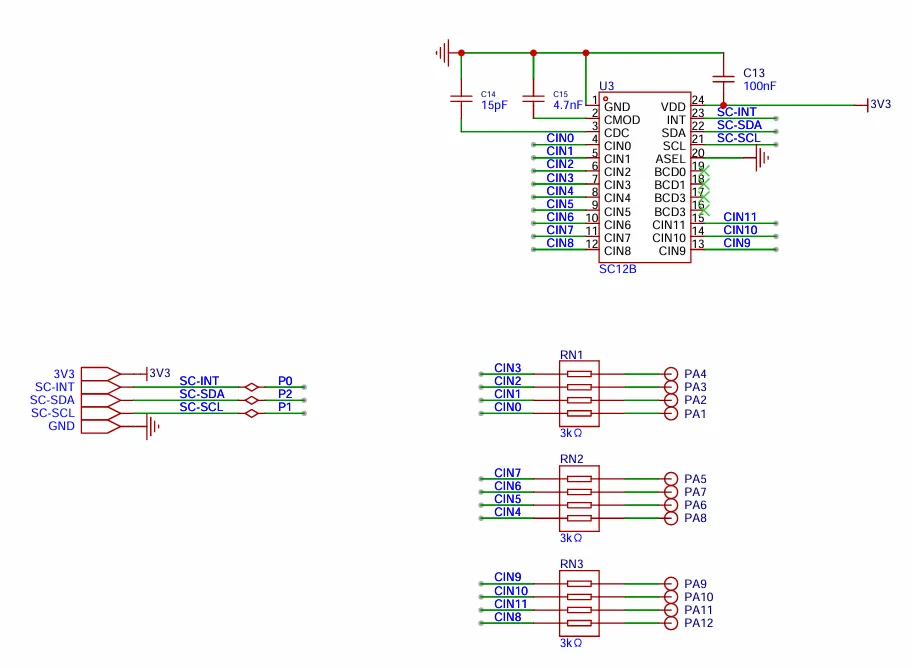
① 触摸芯片 SC12B
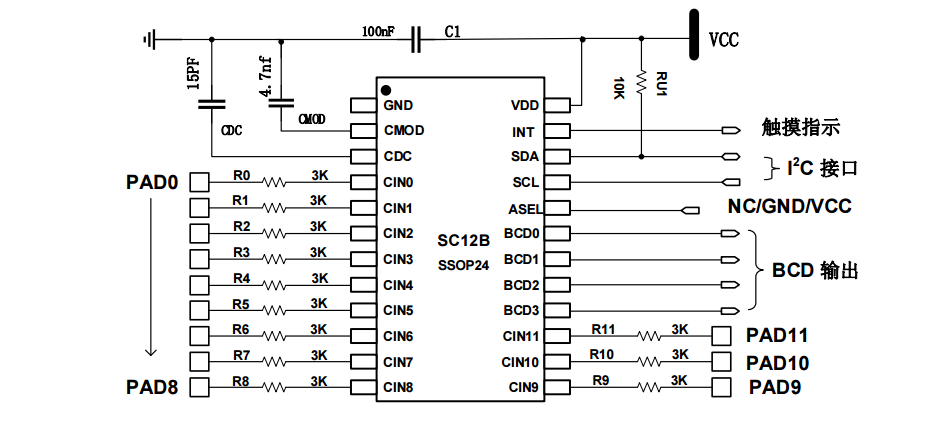


② 原理图
③ 旧版 I2C Example
④ 代码
Int_SC12B.h
#ifndef __INT_SC12B_H__
#define __INT_SC12B_H__
#include "esp_task.h"
#include "driver/gpio.h"
#include "driver/i2c.h"
// 宏定义 定义引脚
#define SC12B_INT_PIN GPIO_NUM_0
#define SC12B_I2C_SCL_PIN GPIO_NUM_1
#define SC12B_I2C_SDA_PIN GPIO_NUM_2
// 宏定义 SC12B I2C 地址
#define SC12B_I2C_ADDR 0x42
// 定义枚举类型,表示1~12个按键
typedef enum
{
Touch_Key_0,
Touch_Key_1,
Touch_Key_2,
Touch_Key_3,
Touch_Key_4,
Touch_Key_5,
Touch_Key_6,
Touch_Key_7,
Touch_Key_8,
Touch_Key_9,
Touch_Key_SHARP,
Touch_Key_M,
Touch_Key_NONE,
} Touch_Key_Typedef;
/**
* @brief 初始化SC12B
*
*/
void Int_SC12B_Init(void);
/**
* @brief 读取被按下的按键
*
* @return Touch_Key_Typedef 被按下的按键值
*/
Touch_Key_Typedef Int_SC12B_ReadKey(void);
#endif /* __INT_SC12B_H__ */Int_SC12B.c
#include "Int_SC12B.h"
// 定义I2C主控制器端口号,使用预定义的I2C_MASTER_NUM(通常为I2C_NUM_0或I2C_NUM_1)
int i2c_master_port = I2C_NUM_0;
// 静态函数:读寄存器
static uint8_t Int_SC12B_ReadReg(uint8_t reg_addr)
{
uint8_t rx_data = 0;
i2c_master_write_read_device(i2c_master_port, SC12B_I2C_ADDR, ®_addr, 1, &rx_data, 1, 1000);
return rx_data;
}
// 静态函数:写寄存器
static void Int_SC12B_WriteReg(uint8_t reg_addr, uint8_t data)
{
uint8_t write_buf[2] = {reg_addr, data};
i2c_master_write_to_device(i2c_master_port, SC12B_I2C_ADDR, write_buf, 2, 1000);
}
// 静态函数:作为中断服务函数
static void Int_SC12B_ISR_Handler(void *arg)
{
is_key_pressed = 1;
}
/**
* @brief 初始化SC12B
*
*/
void Int_SC12B_Init(void)
{
// 1 I2C 初始化设置 -----------------------------------
// 1.1 定义I2C主控制器端口号(已定义全局变量)
// 1.2 配置I2C主控制器参数的结构体
i2c_config_t conf = {
.mode = I2C_MODE_MASTER, // 设置为I2C主模式
.sda_io_num = SC12B_I2C_SDA_PIN, // SDA数据线使用的GPIO引脚号
.scl_io_num = SC12B_I2C_SCL_PIN, // SCL时钟线使用的GPIO引脚号
.sda_pullup_en = GPIO_PULLUP_ENABLE, // 使能SDA上拉电阻,确保空闲时为高电平
.scl_pullup_en = GPIO_PULLUP_ENABLE, // 使能SCL上拉电阻,确保空闲时为高电平
.master.clk_speed = 400000, // I2C总线时钟频率(通常为100kHz或400kHz)
};
// 1.3 使用配置参数初始化I2C控制器
i2c_param_config(i2c_master_port, &conf);
// 1.4 安装I2C驱动:
// 参数1: I2C端口号
// 参数2: 工作模式(主模式)
// 参数3: 接收缓冲区大小(禁用RX缓冲区)
// 参数4: 发送缓冲区大小(禁用TX缓冲区)
// 参数5: 中断分配标志(0表示使用默认中断分配)
i2c_driver_install(i2c_master_port, conf.mode, 0, 0, 0);
// 2. 延时 300ms -----------------------
vTaskDelay(300);
// 3. 设置按键灵敏度 ------------------------------
Int_SC12B_WriteReg(0x00, 0x15);
Int_SC12B_WriteReg(0x01, 0x15);
}
/**
* @brief 读取被按下的按键
*
* @return Touch_Key_Typedef 被按下的按键值
*/
Touch_Key_Typedef Int_SC12B_ReadKey(void)
{
// 1. 读按键状态寄存器
uint8_t key_status1 = Int_SC12B_ReadReg(0x08);
uint8_t key_status2 = Int_SC12B_ReadReg(0x09);
uint16_t key_status = (key_status1 << 8) | key_status2;
// 2. 判断按键状态
Touch_Key_Typedef touch_key = Touch_Key_NONE;
switch (key_status)
{
case 0x8000:
touch_key = Touch_Key_0;
break;
case 0x4000:
touch_key = Touch_Key_1;
break;
case 0x2000:
touch_key = Touch_Key_2;
break;
case 0x1000:
touch_key = Touch_Key_3;
break;
case 0x0800:
touch_key = Touch_Key_7;
break;
case 0x0400:
touch_key = Touch_Key_5;
break;
case 0x0200:
touch_key = Touch_Key_6;
break;
case 0x0100:
touch_key = Touch_Key_4;
break;
case 0x0080:
touch_key = Touch_Key_M;
break;
case 0x0040:
touch_key = Touch_Key_8;
break;
case 0x0020:
touch_key = Touch_Key_9;
break;
case 0x0010:
touch_key = Touch_Key_SHARP;
break;
default:
break;
}
// 返回
return touch_key;
}mian.c 测试代码
#include <stdio.h>
#include "Com_Debug.h"
#include "Int_SC12B.h"
void app_main(void)
{
MY_LOGI("Smart Lock Project: SC12B");
// 1. 初始化SC12B
Int_SC12B_Init();
while (1)
{
// 读取按键
Touch_Key touchKey = Int_SC12B_ReadKey();
if (touchKey != KEY_NO)
{
printf("touchKey = %d\r\n", touchKey);
}
vTaskDelay(10);
}
}⑤ 代码进阶(添加中断)
Int_SC12B.h
添加如下代码:
/* 代码省略 ... */
/**
* @brief 返回被按下的按键,要求被轮询调用
*
* @return Touch_Key_Typedef 被按下的按键值
*/
Touch_Key_Typedef Int_SC12B_TouchKey(void);Int_SC12B.c
添加如下代码:
// 静态函数:作为中断服务函数
static void Int_SC12B_ISR_Handler(void *arg)
{
is_key_pressed = 1;
}
/**
* @brief 初始化SC12B
*
*/
void Int_SC12B_Init(void)
{
/* 代码省略 ... */
// 4. 设置中断 -------------------------------------
// 4.1 定义配置结构体
gpio_config_t io_conf;
// 4.2 设置配置项
io_conf.intr_type = GPIO_INTR_POSEDGE; // 配置GPIO引脚中断 - 上升沿触发
io_conf.pin_bit_mask = (1 << SC12B_INT_PIN); // 设置引脚位掩码,选择要配置的GPIO引脚
io_conf.mode = GPIO_MODE_INPUT; // 设置GPIO工作模式为输入模式(因为我们要检测外部信号)
io_conf.pull_up_en = GPIO_PULLUP_DISABLE; // 浮空,不使能内部上拉电阻
io_conf.pull_down_en = GPIO_PULLDOWN_DISABLE; // 浮空,不使能内部下拉电阻
// 4.3 应用GPIO配置
gpio_config(&io_conf);
// // 4.4 设置中断,使用上升沿
// gpio_set_intr_type(SC12B_INT_PIN, GPIO_INTR_POSEDGE);
// 4.4 开启中断
gpio_install_isr_service(0);
// 4.5 添加中断服务函数
gpio_isr_handler_add(SC12B_INT_PIN, Int_SC12B_ISR_Handler, NULL);
}
/**
* @brief 返回被按下的按键,要求被轮询调用
*
* @return Touch_Key_Typedef 被按下的按键值
*/
Touch_Key_Typedef Int_SC12B_TouchKey(void)
{
// 判断标志位,是否有按键被按下
if (is_key_pressed)
{
// 清除标志位
is_key_pressed = 0;
// 获取被按下的按键值
Touch_Key_Typedef touch_key = Int_SC12B_ReadKey();
// 返回按键值
return touch_key;
}
return Touch_Key_NONE;
}mian.c 测试代码
#include <stdio.h>
#include "Com_Debug.h"
#include "Int_SC12B.h"
#include "Int_WTN6170.h"
void app_main(void)
{
MY_LOGI("Smart Lock Project: SC12B Touch Key Test");
// 1. 初始化SC12B
Int_SC12B_Init();
// 2. 初始化WTN6170
Int_WTN6170_Init();
while (1)
{
// 读取按键状态
Touch_Key_Typedef touch_key = Int_SC12B_TouchKey();
if (touch_key != Touch_Key_NONE)
{
printf("Touch Key: %d \r\n", touch_key);
sayWithoutInt();
if (touch_key < 10)
{
sayNum(touch_key);
}
}
// 阻塞延时
vTaskDelay(10);
}
}7.4 全色灯模块
① The RMT Peripheral
RMT(Remote Control)模块是 ESP32 上的一个专用硬件外设,用于发送和接收可配置的脉冲信号,特别适合处理需要精确时序控制的数字协议。
- 高精度定时:基于 80 MHz 或更高频率的时钟源,可生成 纳秒级精度 的脉冲。
- 自动波形生成:通过配置“数据项”(
rmt_item32_t),由硬件自动输出复杂波形,无需 CPU 实时干预。- DMA 支持:可与内存直接交互,实现长序列数据的自动发送。
- 多通道支持:ESP32 有 8 个 RMT 通道(Channel 0~7),可同时控制多个设备。
② 灯带的通信协议特点
像 WS2812 / NeoPixel 这类灯带使用的是单线异步串行协议,其通信依赖于极其精确的高低电平时间来表示 0 和 1:
| 位值 | 高电平时间 | 低电平时间 | 总周期 |
|---|---|---|---|
0 | ~0.4 μs | ~0.85 μs | ~1.25 μs |
1 | ~0.8 μs | ~0.45 μs | ~1.25 μs |
RMT 模块通过硬件级定时和预定义波形单元来完美匹配这种协议
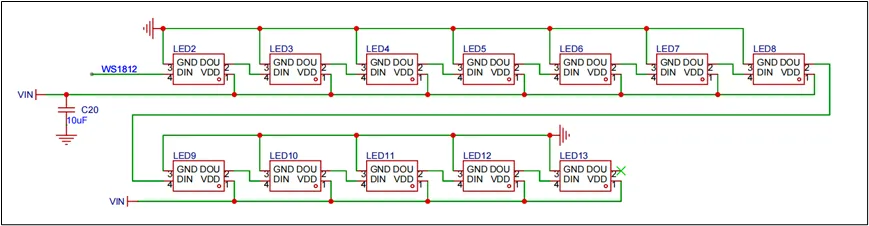
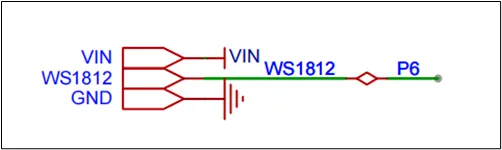
③ 原理图
④ 使用 ESP32 组件库
下载地址
https://components.espressif.com/
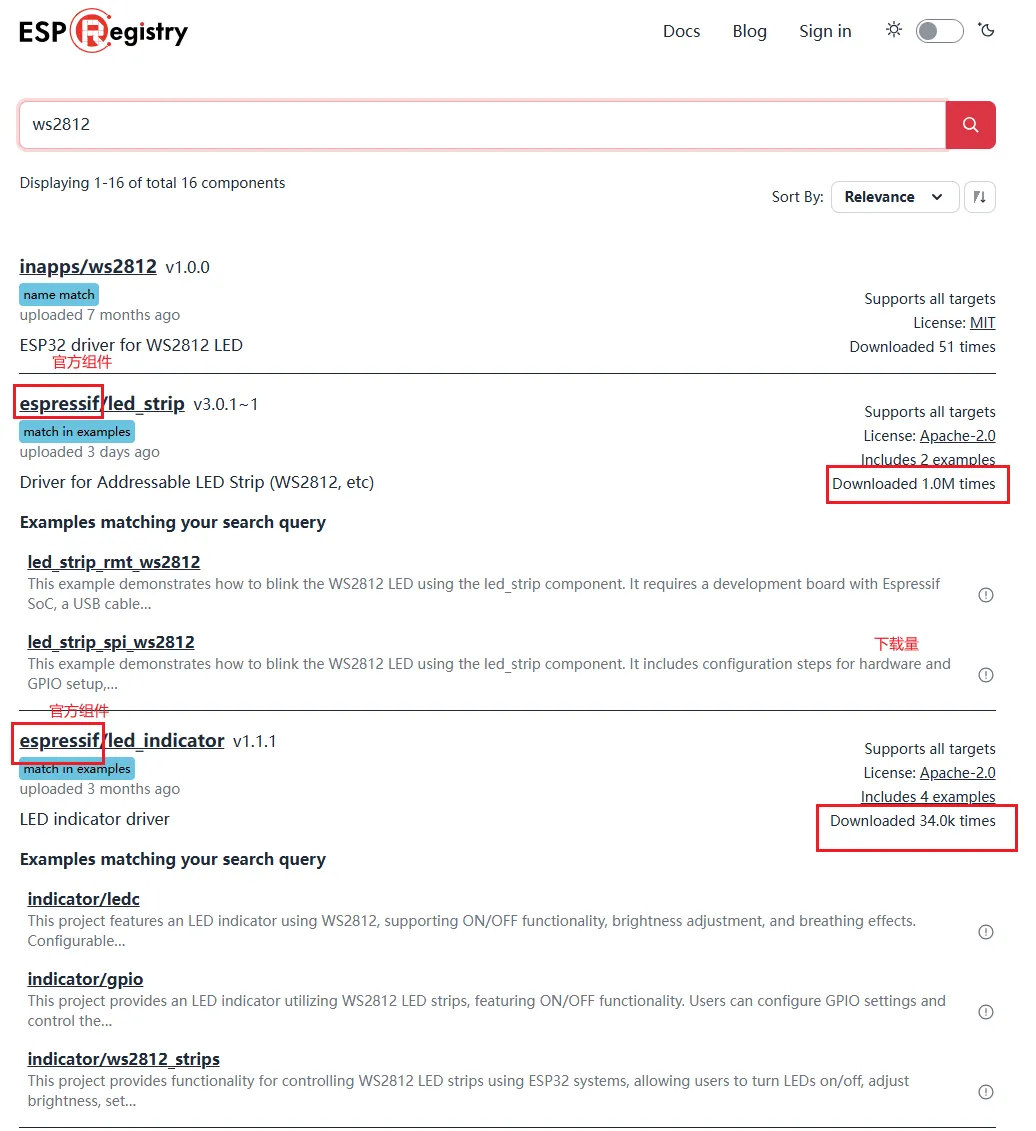
搜索
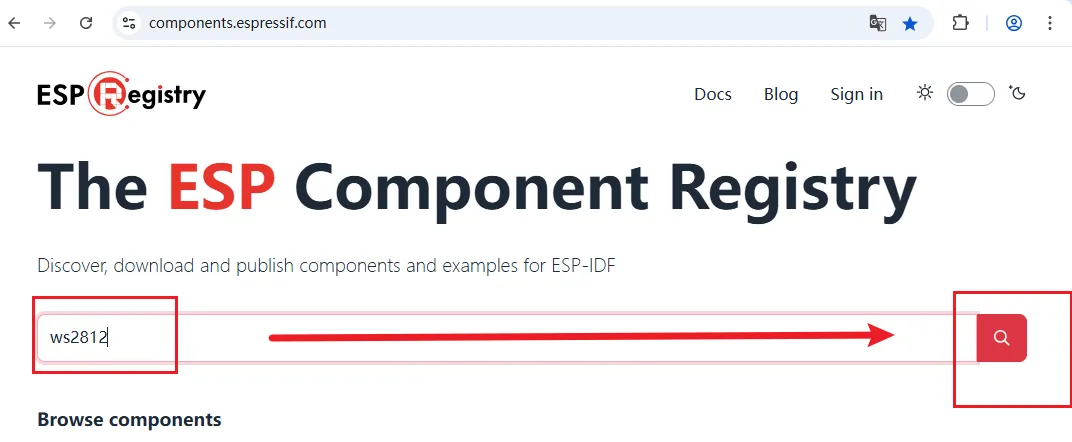
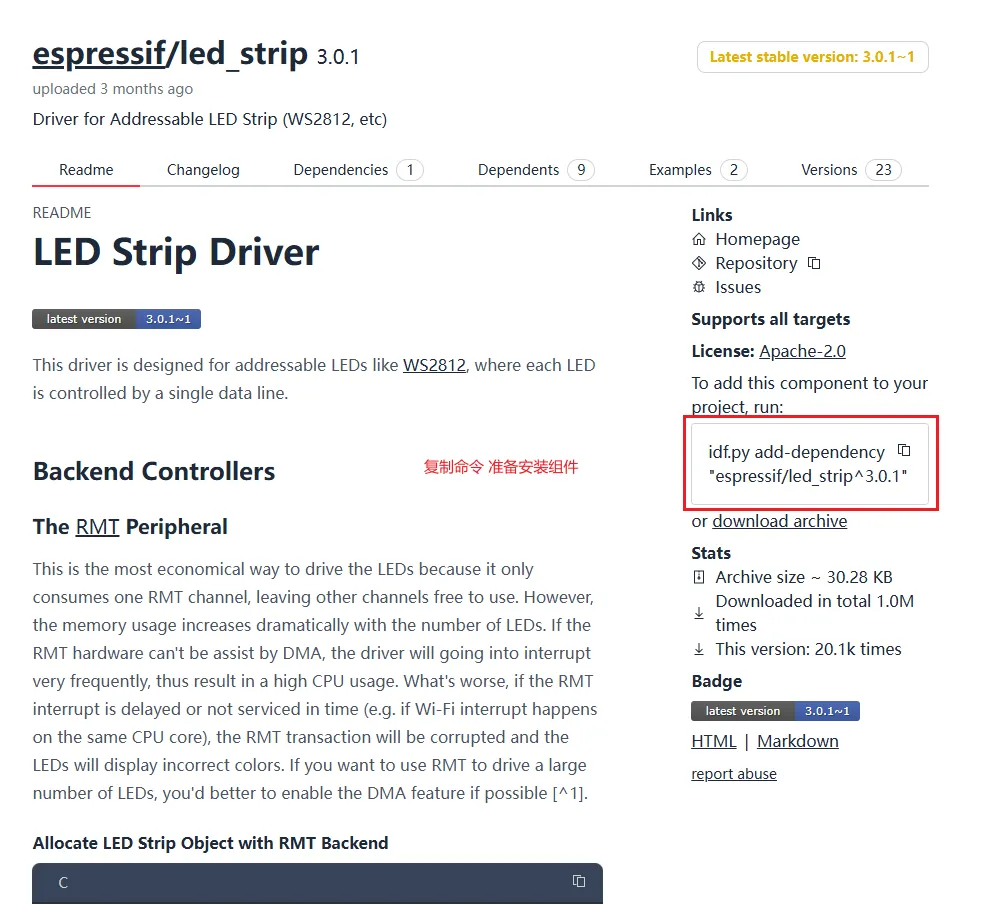
选择组件
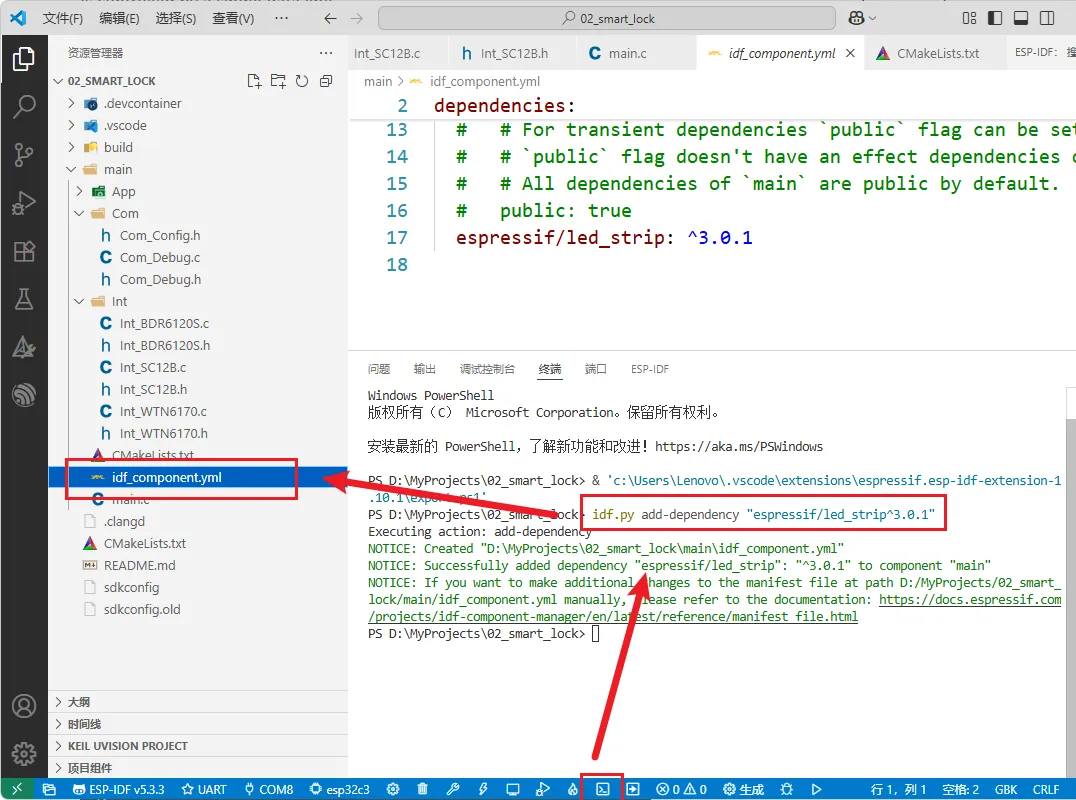
安装命令
安装
下载
⑤ 代码
Int_WS2812.h
#ifndef __INT_WS2812_H__
#define __INT_WS2812_H__
#include "driver/gpio.h"
#include "led_strip.h"
// 宏定义:设置引脚
#define WS2812_PIN GPIO_NUM_6
// 宏定义:LED 数量
#define LED_STRIP_LED_COUNT 12
// 宏定义:RMT 时钟频率(通常 10MHz)
#define LED_STRIP_RMT_RES_HZ (10 * 1000 * 1000)
// extern 声明全局变量
extern uint8_t black[3];
extern uint8_t white[3];
extern uint8_t red[3];
extern uint8_t green[3];
extern uint8_t blue[3];
extern uint8_t cyan[3]; /* 青色 */
extern uint8_t purple[3]; /* 紫色 */
/**
* @brief 初始化WS2812 LED strip
*
*/
void Int_WS2812_Init(void);
/**
* @brief 打开指定LED
*
* @param led_index LED 索引,0~11
* @param r 红色分量(0-255)
* @param g 绿色分量(0-255)
* @param b 蓝色分量(0-255)
*/
void Int_WS2812_On(uint8_t led_index, uint8_t r, uint8_t g, uint8_t b);
/**
* @brief 关闭所有LED
*
*/
void Int_WS2812_Off(void);
#endif /* __INT_WS2812_H__ */Int_WS2812.c
#include "Int_WS2812.h"
// 定义 LED strip 句柄
led_strip_handle_t led_strip;
/* 定义几种常见颜色 RGB */
uint8_t black[3] = {0, 0, 0};
uint8_t white[3] = {255, 255, 255};
uint8_t red[3] = {255, 0, 0};
uint8_t green[3] = {0, 255, 0};
uint8_t blue[3] = {0, 0, 255};
uint8_t cyan[3] = {0, 255, 255}; /* 青色 */
uint8_t purple[3] = {255, 0, 255}; /* 紫色 */
/**
* @brief 初始化WS2812 LED strip
*
*/
void Int_WS2812_Init(void)
{
// 1. 配置 GPIO
led_strip_config_t strip_config = {
.strip_gpio_num = WS2812_PIN, // GPIO 引脚号
.max_leds = LED_STRIP_LED_COUNT, // LED 数量
.led_model = LED_MODEL_WS2812, // LED 型号
.color_component_format = LED_STRIP_COLOR_COMPONENT_FMT_RGB, // 颜色顺序
.flags = {
.invert_out = false, // 是否反转输出信号
}};
// 2. 配置 RMT
led_strip_rmt_config_t rmt_config = {
.clk_src = RMT_CLK_SRC_DEFAULT, // 时钟源
.resolution_hz = LED_STRIP_RMT_RES_HZ, // RMT 时钟频率(通常 10MHz)
.mem_block_symbols = 0, // RMT 内存块大小
.flags = {
.with_dma = 0, // 是否使用 DMA
}};
// 3. 创建 LED strip 设备
led_strip_new_rmt_device(&strip_config, &rmt_config, &led_strip);
}
/**
* @brief 打开指定LED
*
* @param led_index LED 索引,0~11
* @param r 红色分量(0-255)
* @param g 绿色分量(0-255)
* @param b 蓝色分量(0-255)
*/
void Int_WS2812_On(uint8_t led_index, uint8_t r, uint8_t g, uint8_t b)
{
// 设置颜色
led_strip_set_pixel(led_strip, led_index, r, g, b);
// 刷新 LED strip
led_strip_refresh(led_strip);
}
/**
* @brief 关闭所有LED
*
*/
void Int_WS2812_Off(void)
{
// 关闭所有 LED
led_strip_clear(led_strip);
// 刷新 LED strip
led_strip_refresh(led_strip);
}main.c 测试代码
#include <stdio.h>
#include "Com_Debug.h"
#include "Int_BDR6120S.h"
#include "Int/Int_WTN6170.h"
#include "Int_SC12B.h"
#include "Int_WS2812.h"
void app_main(void)
{
// Ws2812初始化
Int_WS2812_Init();
Int_WS2812_LedOn(5, red);
vTaskDelay(2000);
Int_WS2812_LedOn(7, blue);
vTaskDelay(2000);
Int_WS2812_LedOn(0, white);
vTaskDelay(2000);
while (1)
{
}
}